本科生教学
- 《机电一体化系统设计》
有感于机电工程学院目前过于偏重机械学知识的本科培养模式,结合自身科研工作中的一些体会,在2014年秋季学期开设了面向高年级本科生的《基于xPC Target的实时控制系统入门》这门课程。将国际上在工科院校里倍受欢迎的MATLAB软件引入课程,着重讲述如何基于xPC Target实现硬件在环及产品快速原型的系统仿真、构建实时控制的机电系统,旨在培养本科生形成机电一体化的设计理念,提升机电系统的综合设计能力。目前国内还没有全面介绍xPC Target的中文教材,更缺乏相应的实验教学仪器。开发了一套便携式实时伺服控制机电一体化系统,以服务于本课程的课堂教学与实验教学环节。
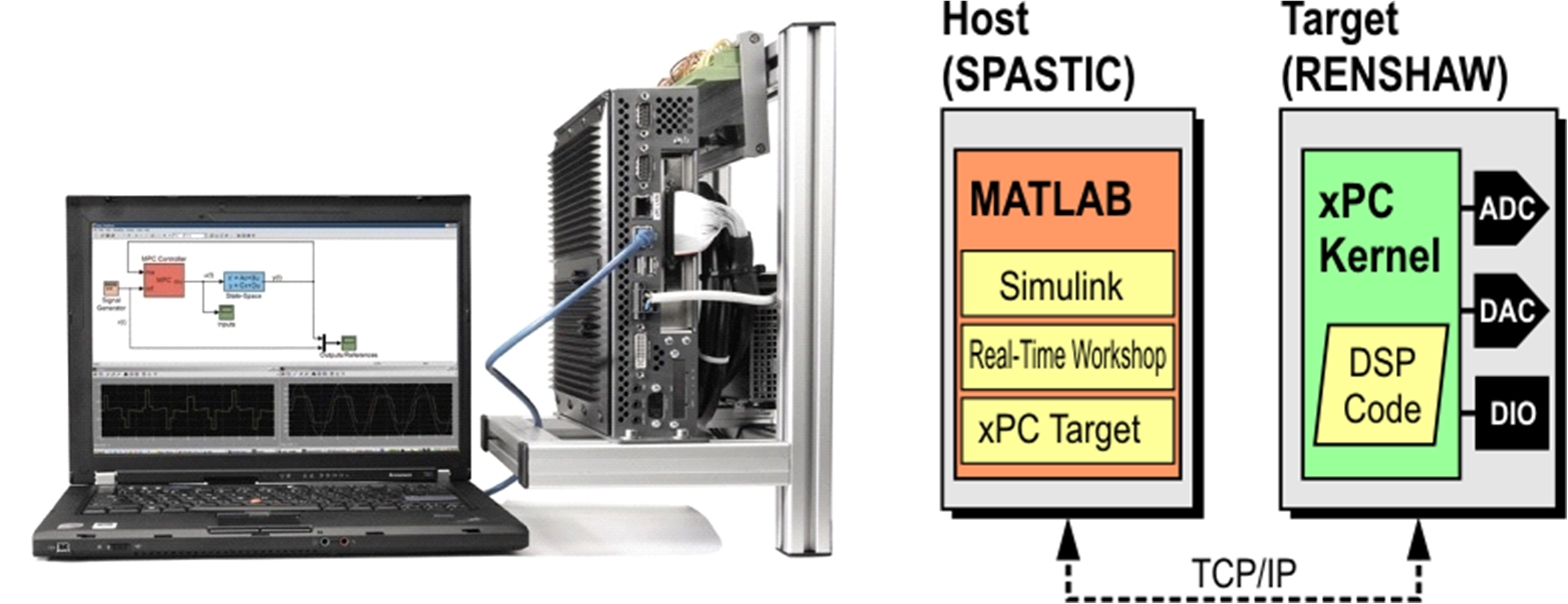
xPC Target是MathWorks公司提供和发行的一个基于Real-Time Workshop的附加产品,可将普通PC机转变为一个实时系统,支持多种类型的 I/O 设备板,是一种用于产品原型开发、测试和配置实时系统的PC机解决途径。作为系统动态仿真领域的重要工具,xPC Target是系统半物理仿真的绝佳选择。xPC Target采用宿主机—目标机方式的 “双机”模式;宿主机用于运行Simulink模块设计、创建目标应用程序;目标机用于执行宿主机所生成的代码,通过I/O设备板对机械系统发送控制信号并接收反馈信号。xPC Target 通过以太网连接或串口通讯来实现宿主机与目标机之间的通讯。
a)机电系统硬件搭建实验
学生通过连接机械系统中伺服电机—驱动器—接线端子台、位移传感器—接线端子台、行程开关—接线端子台、温度传感器—接线端子台之间的线缆完成机电系统的搭建工作。本实验课程可提高学生对机电一体化系统基本组成的认识,加深学生对机电系统中各组成部件间电路连接关系的理解。
b)机电系统软件开发实验
学生在宿主机上Simulink环境下编写实时控制程序,实现伺服电机的运动控制及系统中位移传感器、温度传感器、行程开关的信号采集。本实验课程可使学生深入学习机电系统控制软件的编写方法,掌握基于xPC Target实现机电系统中典型模拟信号及数字信号发送与采集的方法。
c)伺服电机控制模式比较实验
学生在宿主机上编写实时控制程序,分别实现伺服电机的力矩模式、速度模式及位置模式的运动控制,并比较分析伺服电机在不同控制模式下的输出特性。本实验课程可使学生具备基于xPC Target实现伺服电机的不同工作模式的能力,加深学生对伺服电机在不同工作模式下输出特性的理解。

- 《半物理仿真系统设计与实践》—创新研修课
在国外,Matlab已成为一门工科学生必须掌握的计算语言,在学习与科研活动中得到广泛应用。Simulink Real-Time能够进行系统半物理仿真,其中包括硬件在环(Hardware-in-the-loop, HIL)半物理仿真和快速控制原型(Rapid Control Prototyping, RCP)半物理仿真。本课程主要面向全校具有机械与电气专业知识背景的本科生,重点讲述半物理仿真基础,Matlab科学计算基础,Simulink动态仿真,基于Simulink Real-Time构建半物理仿真平台等内容。本课程的目的是培养学生进行机电一体化系统半物理仿真的能力。
研究生教学
- 《航天器结构与机构》—学科核心课
《航天器结构与机构》较全面地介绍了航天器结构与机构的技术基础,包括它们的环境条件、材料、设计、分析、制造、试验和可靠性,重点阐述航天器结构与机构的设计和分析技术。
整个课程共分为18章,可以分为四个部分:第1章到第3章说明了航天器结构与机构的基本概念、功能、类型、研制流程以及相关的环境条件和应用的材料。第4章到第11章为航天器结构的设计和分析,重点为设计和分析的原理与方法,并详细介绍了较典型的航天器结构,包括杆系结构、蜂窝夹层板结构、中心承力筒结构、密封舱结构和防热结构。第12章到第15章为航天器机构的设计和分析。重点阐述设计和分析的原理和方法,并详细介绍机构的主要装置以及太阳翼机构和连接分离机构。第16章到第18章为航天器结构与机构的可靠性、制造和试验,说明了它们的一些基本概念和与设计有关的要求。
本课程由全齐全教授与郭宏伟教授共同讲授。全齐全老师负责第1~11章;郭宏伟老师负责第12~18章。

新生训练
面向对象:所有新入研究室的研究生、本科生
AMT研究室发明了一种针对所有入学新生的训练方法,用于强化新生的机电一体化意识。在三周的时间内,需要完成一套机电一体化系统的完整设计工作,包括总体方案设计、机械系统设计、电气系统设计、机电一体化集成。

a)总体方案设计
提出一套由宿主机、目标机、机械系统组成的机电一体化系统方案。宿主机为一台能够运行MATLAB的独立笔记本计算机;目标机采用工业控制计算机和NI PCI-6229多功能数据采集卡;机械系统包含一套典型的MAXON伺服电机及驱动器、联轴器、扭矩传感器、磁滞制动器及温度传感器。在宿主机的MATLAB/Simulink环境下编写控制程序,目标机内仅安装一个1.4 M左右的核程序,下载宿主机编译好的程序代码进行实时运行。目标机和机械系统分别布置在两个便携式工具箱内。
b)机械系统设计
MAXON伺服电机经过联轴器,将动力经扭矩传感器传递给磁滞制动器。磁滞制动器能够对同轴布置的伺服电机进行连续回转加载;扭矩传感器用于实时获取负载的大小。温度传感器用于感知环境温度和伺服电机壳体的温升情况。需要完成机械系统原理图、二维装配图设计和三维模型的构建。
c)控制系统设计
控制系统由宿主机和目标机组成。宿主机为一台能够运行MATLAB的笔记本计算机;目标机由工业控制计算机和NI PCI-6229多功能数据采集卡组成。宿主机、目标机之间通过Ethernet交叉网线通讯。目标机通过NI专用线缆SHC68-68-EMP实现数据采集卡与机械系统内接线端子台间的信号传递。在宿主机上编写的Simulink控制程序通过交叉网线下载到目标机实时运行,实现对机械系统的实时控制。需要完成电气系统原理图、电气系统接线图、电气系统布局图的设计。
d)机电一体化集成
在完成机械系统和控制系统以后,需要进行机电一体化系统集成。需要完成机电系统三维建模、机械零件二维图设计、电气系统硬件开发、电气系统软件开发、原理样机系统调试。
