
学位:工学硕士
学科:机械工程
论文题目:弹跳机器人连续运动落点位置控制研究
- 将弹跳机器人简化为质量弹簧倒立摆模型,设计了机器人整体机构方案,采用串联弹性致动器驱动的齿轮-连杆机构,实现了弹跳运动,采用直流有刷电机驱动机器人尾部质量块,实现了姿态控制。
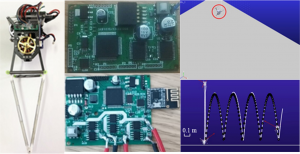
- 研制了单自由度连续弹跳机器人原理样机,原理样机采用嵌入式系统,其硬件核心为STM32控制的六相全桥无刷电机驱动电路。设计了无刷直流电机驱动算法和力位混合的空中腿部转角控制算法。实验证明触地动力学模型预测的姿态角和速度变化的准确性,样机可沿导轨进行250 mm的连续弹跳运动。
- 设计了嵌入式姿态控制系统硬件,基于四元数法解算了机体姿态,并由加速度计信息互补滤波,设计了机器人空中主动姿态控制算法。进行空中主动姿态控制实验,验证了姿态控制方案的可行性,最终控制角度误差小于2°。
- 设计了基于触地动力学模型的无差拍速度控制策略。建立了弹跳机构和姿态控制机构的联合仿真模型,进行了连续弹跳仿真,结果显示前三次落点误差在50 mm以内,证明了落点控制方法可行。
发表论文:
- Chong H, Dewei T, Qiquan Q, Zhuoqun C, Zongquan D. A combined series-elastic actuator & parallel-elastic leg no-latch bio-inspired jumping robot[J]. Mechanism and Machine Theory, 2020, 149(1): 103814.
参与项目:
- 2019年1月至2021年6月,参与国家自然科学基金创新研究群体项目:弹跳机器人连续运动落点位置控制研究
- 2018年12月至2019年9月,参与横向课题:某驱动器驱动力矩测试装置的设计
- 2018年1月至2018年7月,参与横向课题:小行星探测器着陆缓冲装置的设计与研究