Undergraduate Teaching
- “Introduction to Real-time Control System Based on xPC Target” — major elective course
Teacher: Qiquan Quan
Teaching Object: B4 students majoring in aerospace manufacturing engineering
In view of the current undergraduate training mode of the Institute of electrical and mechanical, which focuses too much on mechanical knowledge, combined with some experience in my own research work, the course “Introduction to Real-time Control System Based on xPC Target” was opened for senior undergraduates in the fall semester of 2014. MATLAB, which is internationally popular in engineering colleges, is introduced into the course, focusing on how to realize system simulation of hardware in the loop (HIL) and product Rapid Prototyping Control (RPC) based on xPC Target, and construct real-time control electromechanical system. The purpose is to train undergraduate students to form the design concept of mechatronics and improve their comprehensive design ability of electromechanical system. At present, there is no comprehensive introduction of xPC Target’s Chinese textbooks in China, let alone the corresponding experimental teaching instruments. A portable real-time servo control mechatronics system is developed to serve the classroom teaching and experimental teaching of this course.
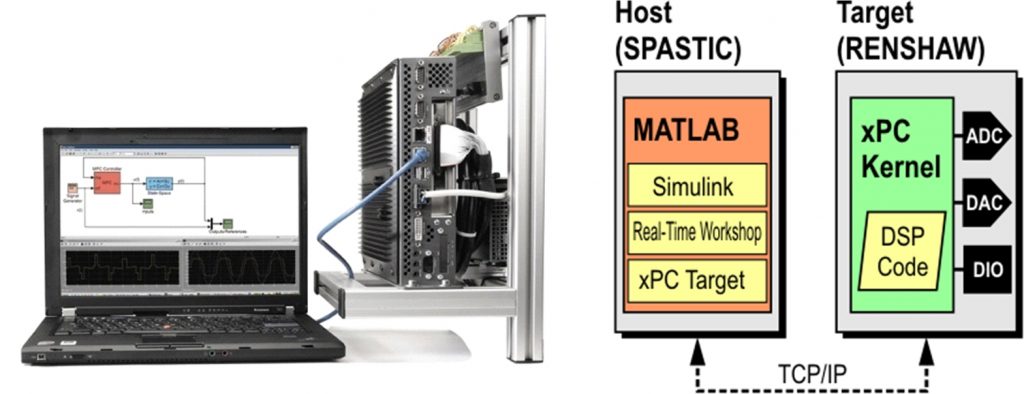
XPC Target is an additional product provided and released by MathWorks, Inc., based on real-time Workshop. It can transform the ordinary PC into a real-time system, supporting a variety of Types of I/O device boards, and is a PC solution for product prototype development, testing and configuration of real-time systems. As an important tool in the field of system dynamic simulation, xPC Target is an excellent choice for system semi-physical simulation. XPC Target adopts the host-target mode of “two-machine”. The host is used to run the Simulink module and create the target application. The target machine is used to execute the code generated by the host machine and send control signals to the mechanical system and receive feedback signals through the I/O board. XPC Target achieves communication between host and target through Ethernet connection or serial port communication.
a) Mechanical and electrical system hardware construction experiment
Students complete the construction of the electromechanical system by connecting the cables between the servo motor – driver – terminal station, displacement sensor – terminal station, travel switch – terminal station, temperature sensor – terminal station. This experiment course can improve students’ understanding of the basic components of the electromechanical integration system and deepen students’ understanding of the connection relationship between the components of the electromechanical system.
b) Electromechanical system software development experiment
Students write the real-time control program in the host Simulink environment to realize the motion control of servo motor and the signal acquisition of displacement sensor, temperature sensor and travel switch in the system. This experiment course enables students to deeply learn the writing method of electromechanical system control software program and master the method of sending and collecting typical analog signals and digital signals in electromechanical system based on xPC Target.
c) Servo motor control mode comparison experiment
Students write the real-time control program on the host to realize the motion control of the servo motor’s torque mode, speed mode and position mode respectively, and compare and analyze the output characteristics of the servo motor under different control modes. This experiment course can enable students to realize different working modes of servo motor based on xPC Target, and deepen students’ understanding of output characteristics of servo motor under different working modes.

- “Design and Practice of Semi-Physical Simulation System” — innovation research course
Teacher: Qiquan Quan
Teaching Object: students above B2 (no more than 10 students each time)
In foreign countries, MATLAB has become a computing language that engineering students must master and is widely used in learning and scientific research activities. Simulink real-time is capable of carrying out system semi-physical simulation, including Hardware-in-the-Loop (HIL) semi-physical simulation and Rapid Control Prototyping (RCP) semi-physical simulation. This course is mainly for undergraduates with mechanical and electrical professional background, focusing on the basis of semi-physical simulation, MATLAB scientific calculation foundation, Simulink dynamic simulation, and the construction of semi-physical simulation platform based on Simulink real-time. The purpose of this course is to cultivate students’ ability of semi-physical simulation of mechatronics system.
Master Teaching
- “Spacecraft Structure and Mechanism” — subject core course
Teachers: Qiquan Quan and Hongwei Guo
Teaching Object: M1 students majoring in aerospace manufacturing engineering
“Spacecraft structure and Mechanism” introduces the technical basis of spacecraft structure and mechanism comprehensively, including their environmental conditions, materials, design, analysis, manufacture, test and reliability, and focuses on the design and analysis technology of spacecraft structure and mechanism.
The whole course is divided into 18 chapters, which can be divided into four parts: Chapter 1 to Chapter 3 describes the basic concept, function, type, development process, relevant environmental conditions and applied materials of the spacecraft structure and mechanism. Chapter 4 to Chapter 11 is the design and analysis of spacecraft structure, focusing on the principles and methods of design and analysis, and introduces in detail the typical spacecraft structure, including rod structure, honeycomb sandwich plate structure, central load-bearing cylinder structure, sealed cabin structure and heat protection structure. Chapter 12 to Chapter 15 is the design and analysis of the spacecraft mechanism, focusing on the principle and method of design and analysis, and the main device of the mechanism, as well as the solar wing mechanism, connection and separation mechanism are introduced in detail. Chapters 16 through 18 describe the reliability, fabrication and testing of spacecraft structures and mechanisms, describing some of their basic concepts and design-related requirements.
This course is taught by Dr. Qiquan Quan and Dr. Hongwei Guo. Dr. Quan is responsible for chapters 1~11 and Dr. Guo is in charge of chapters 12 to 18.

Training for Freshman
Teaching Obejct: all new graduate and undergraduate students
AMT laboratory has invented a training method for all incoming freshmen to strengthen their mechatronics awareness. Within three weeks, it is required to complete the complete design of a set of mechatronics system, including the overall scheme design, mechanical system design, electrical system design, mechatronics integration.

a) Overall scheme design
A mechatronics system scheme consisting of host machine, target machine and mechanical system should be proposed. The host machine is an independent notebook computer capable of running MATLAB; The target machine adopts industrial control computer and NI PCI-6229 multi-function data acquisition card. The mechanical system consists of a typical MAXON servo motor and driver, coupling, torque sensor, hysteresis brake and temperature sensor. The control program is written in the MATLAB/Simulink environment of the host machine. Only a 1.4m or so nuclear program is installed in the target machine, and the program code compiled by the host machine is downloaded for real-time operation. The target machine and the mechanical system are respectively arranged in two portable tool boxes.
b) Mechanical system design
The MAXON servo motor transmits the power through the torque sensor to the hysteresis brake through the coupling. The hysteresis brake can perform continuous rotary loading on the coaxial servo motor. The torque sensor is used to obtain the size of the load in real time. The temperature sensor is used to sense the ambient temperature and the temperature rise of the servo motor housing. The mechanical system schematic diagram, 2D assembly drawing design and 3D model construction should be completed.
c) Control system design
The control system consists of host machine and target unit. The host machine is a laptop computer capable of running MATLAB; The target machine is composed of industrial control computer and NI PCI-6229 multi-function data acquisition card. The host and target communicate via an Ethernet crossover network wire. The target machine realizes the signal transmission between the data acquisition card and the wiring terminal of the mechanical system through the NI special cable SHC68-68-EMP. Simulink control program written on the host computer is downloaded to the target computer to run in real time, which realizes the real-time control of the mechanical system. The electrical system schematic diagram, electrical system wiring diagram, electrical system layout diagram design needs to be completed.
d) Mechatronics integration
After the completion of the mechanical system and control system, mechatronics system integration is required. It is necessary to complete 3D modeling of electromechanical system, 2D drawing design of mechanical parts, hardware development of electrical system, software development of electrical system and debugging of prototype system.
