Degree: B.S.
Major: Mechatronics Engineering
Thesis Title: Design and experimental verification of legs on a wheel-legged hybrid robot for Callisto exploration (面向木卫四探测的轮腿复合式机器人腿部设计及试验验证)
- 将传统C形轮腿改进为D形轮腿,并引入弹性单闭环结构,使改进后的轮腿复合式机器人可稳定通过复杂地形。
- 分析了轮腿驱动模式、触地方式及支撑姿态,开展不同障碍物高度测试得到了触地姿态转移规律与轮腿机器人越障高度上限。
- 定义了关节驱动力与广义刚度,分析了轮腿膝关节的力学特性及D形轮腿的缓冲储能能力,并对弹性元件参数进行了优化配置,在一定程度上提升了轮腿的整体力学性能。
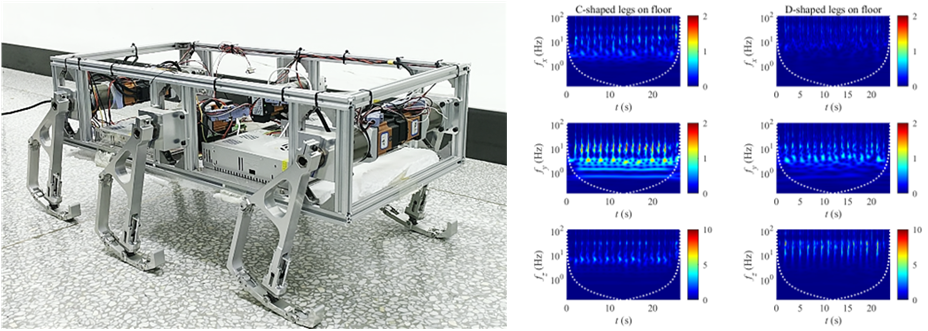
- 开展C形与D形轮腿整机对比试验,并对整机加速度进行连续小波分析。结果表明,D形轮腿在支撑状态下具有更高的刚度,振动频率发生蓝移,振幅减小,整机行走轨迹更加平稳且趋于笔直。
Award:
- 哈尔滨工业大学第七届教学节十佳学习之星