ID: NEWS2026-No.3
Time: March 11, 2026
Place: Harbin, China
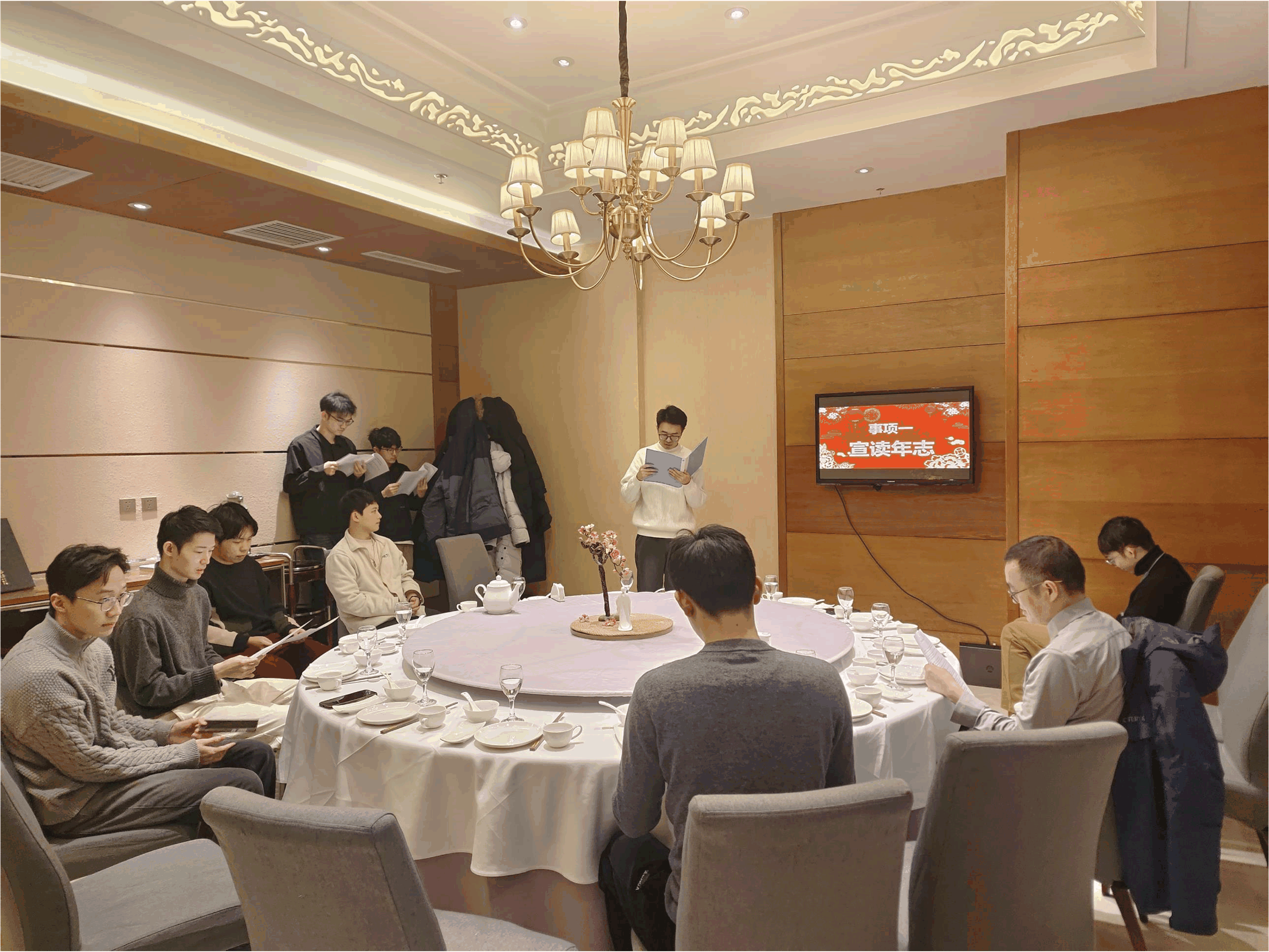
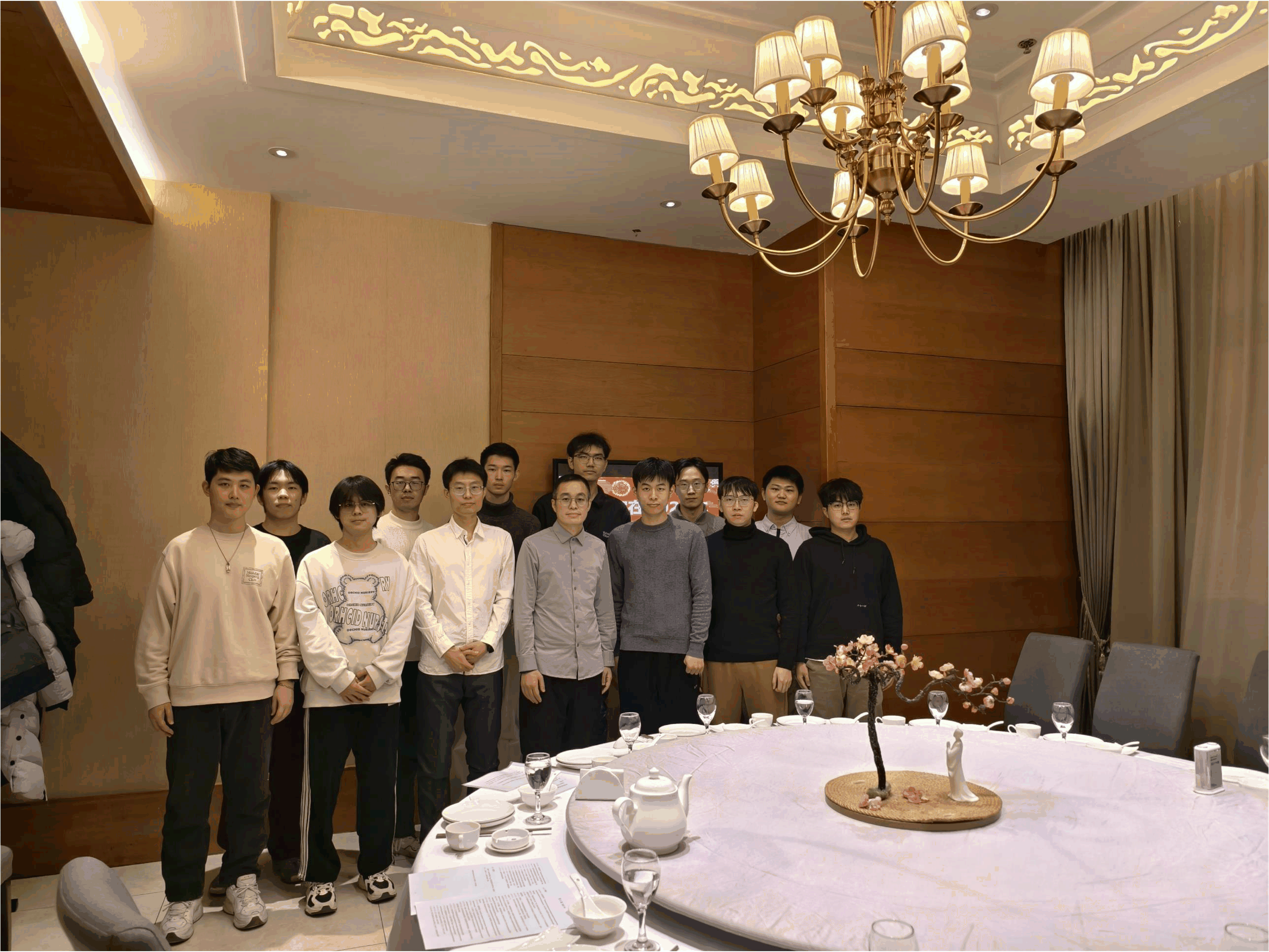
Event: To celebrate the arrival of the 2026 spring semester, Prof. Qiquan Quan and the graduate students of the AMT Laboratory hold a dinner gathering at Chuzhanggui. During the dinner, Prof. Quan discusses the students’ recent job-search progress and encourages them to maintain a calm mindset in their future careers and lives, and pursue inner peace.

This article is contributed by Bo Tang.