ID: NEWS2025-No.6
Time: June 01–07, 2025
Place: Toyama and Kusatsu, Japan
Event: From June 1 to June 4, the 2025 IEEE International Conference on Real-time Computing and Robotics (IEEE RCAR 2025) is held at the Toyama International Conference Center, Japan. Prof. Qiquan Quan, Prof. Gangfeng Liu, and Ph.D. candidate Bo Tang attend the academic conference. Prof. Qiquan Quan serves as the Program Co-Chair for the conference. Ph.D. candidate Tang Bo delivers an academic lecture titled “Design of a quadrotor flying robot capable of Mars rock sample collection.”
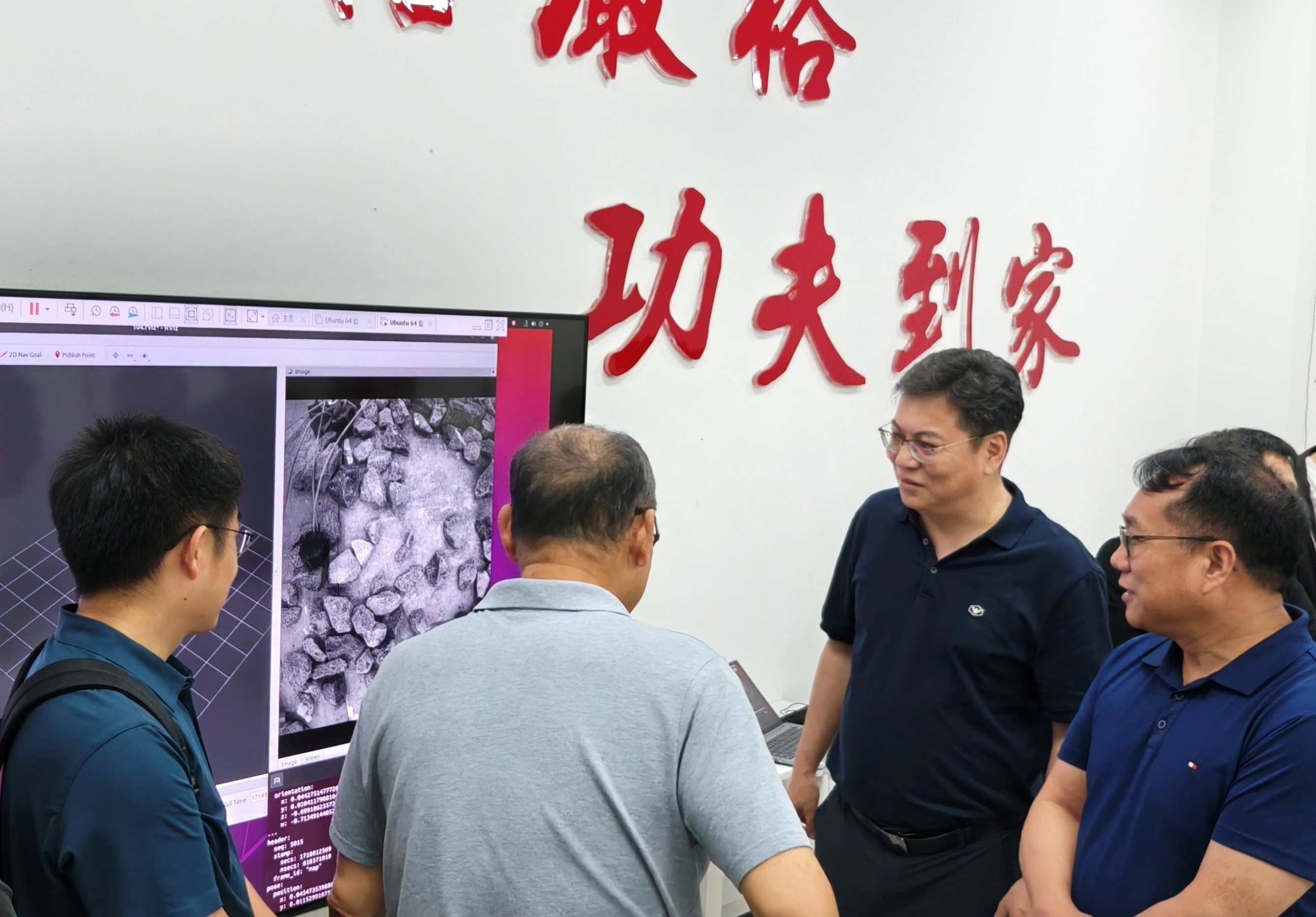
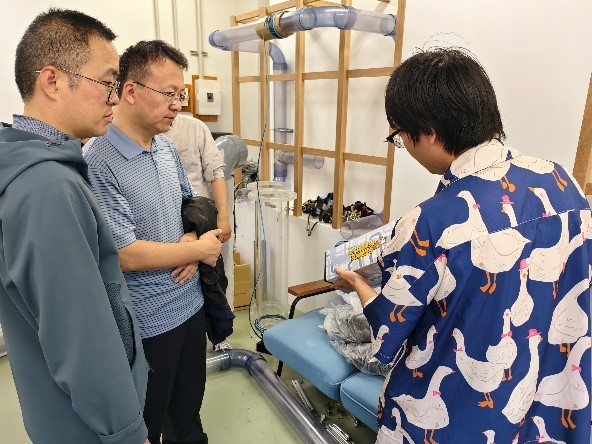
On June 5th and 6th, Prof. Qiquan Quan, Prof. Gangfeng Liu, and Ph.D. candidate Bo Tang visit Cloud Robotics laboratory, Actuation laboratory and Soft Robotics laboratory at Ritsumeikan University. They engage in extensive discussions with the Ph.D. candidates from China about the development and research of robotics technology.



This article is contributed by Bo Tang.